【算法】插入排序与希尔排序的一些理解
本章讲解了插入排序与其升级版–希尔排序的主要思想与代码实现。
🤑插入排序
插入排序是最简单的一种排序方法,其本质就在于不断从后向前插入。
意思就是,将待排序序列的第一个当做有序序列,然后将第二个往前插入,要求升序则将两数中较小的那个排至最前面,降序则把较大的放在最前面。这样操作一次就把前两个数变成了一个有序数列,同理操作第三个数,第四个数·······直到将整个数列排列完成。
以下是一张动图,可以直观感受插排的过程。

图源菜鸟教程。
就像是打牌一样,将手中的牌进行整理,按照一个顺序依次排好。
思想清楚了就可以写代码了,先书写单趟的循环(这里写的是升序)。
我们将每次排好序的队列的下标的最后一位定为end,那么需要往前插入的就是处在end+1的元素。将这个元素暂存在tmp中,并向前比较,遇到比他大的则依次向后放。
1 | int end; |
要想对整个数列进行排序,就需要对end做出相应的变化。
1 | void insertsort(int* a, int asize) { |
🤠希尔排序
希尔排序算是一个插入排序的升级版。插入排序虽然思路简单,但一遇到数据量过大,运算就会非常吃力,在最不理想情况下,其时间复杂度会到达O(n^2),显然插入排序在使用中存在着巨大的缺陷。
希尔排序则很巧妙的解决了复杂度过高的问题。
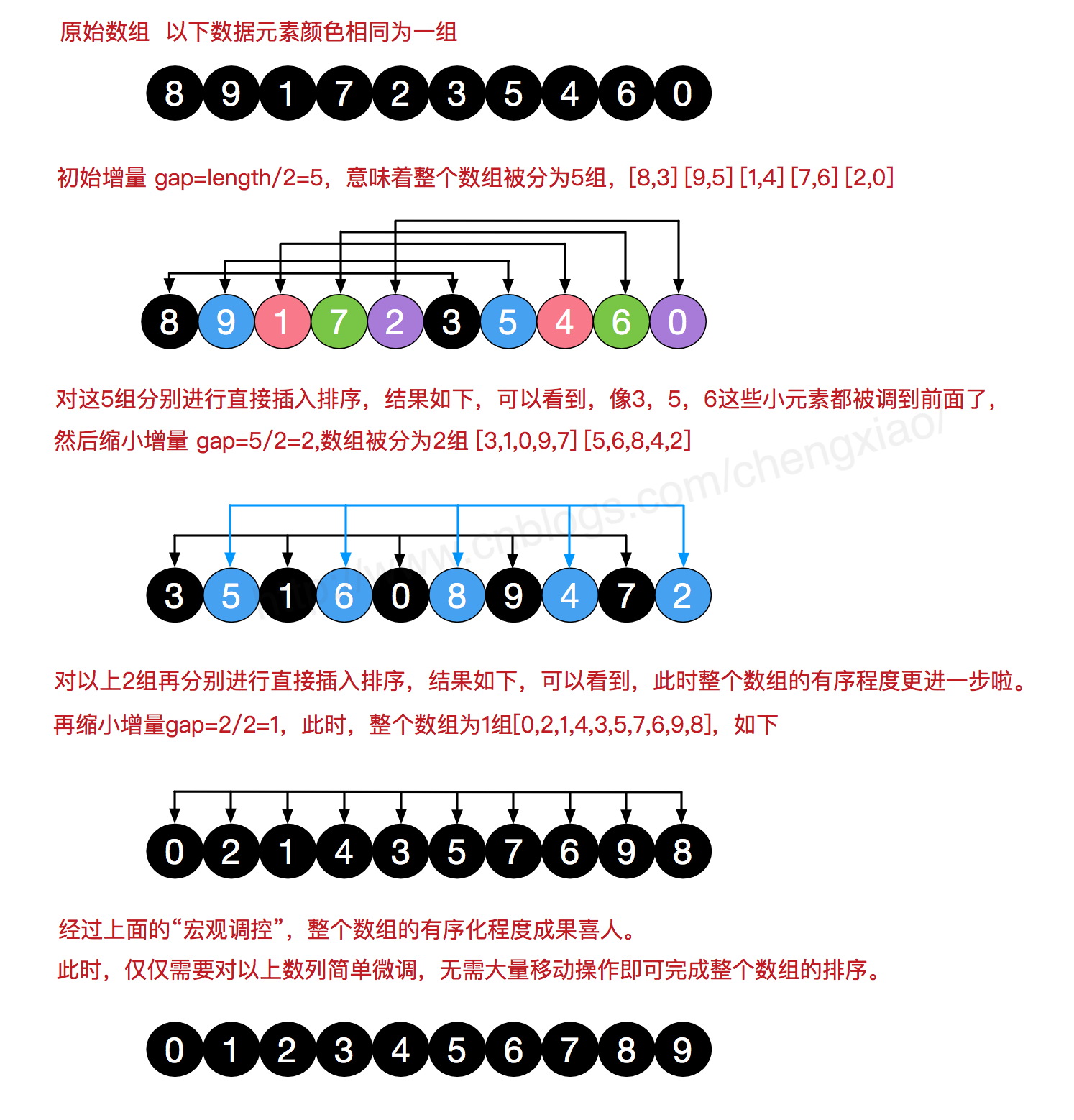
希尔排序的主要思想就是进行预排序:
比如有一个队列 1,3,5,2,6,4,7,8,9,10,5,2
希尔排序会要求先对其进行分组,我们这里将其分为4组,gap(间隔)为3:
会得到第一组:1,6,9,,第二组3,4,10,第三组5,7,5,第四组2,8,2。
我们现在要求进行降序排列,那么对四组分别进行排序,就会使得整个数组变成:
9,10,7,8,6,4,5,2,1,3,5,2
相比于初始数列,会发现其变的基本有序,此时再对整个数组进行插入排序,就会减少很多的运算量。
但需要注意的是希尔排序是一种不稳定的排序,因为预排序的结果是不可控的。
即其算法思想为:先进行多组预排序,最后执行插入排序。
图源此处
还是先书写单趟的排序。其本质与插排是一样的,所以只需要更改几个地方即可。
1 | int end; |
从代码可以看出,就是将+1或者-1的地方替换为了gap的步长。
再书写整体的循环。
那么问题又来了,如何确定gap的大小呢?gap过大,可能会使得整个数列的预排序收效甚微,gap过小,其效果又基本等同于插入排序。
我们可以选择进行多次多趟的预排序,让gap=asize,之后不断gap/=2,在不断的预排序过程中就会使得数列接近有序,同时最终gap会等于1,此时等同于对一个接近有序的数列进行插入排序。
在进行排序的过程中,可以选择多组排序同时进行的方式,这样代码会显得会更加简洁。也就是同样的gap时,对队列中的所有分组进行预排序,实现也非常简单,让i循环时+1而非+gap即可。
那么代码的实现如下:
1 | void shellsort(int* a, int asize) { |
但希尔排序并非是一种稳定的排序,也因为gap的计算方式五花八门,所以其时间复杂度是存在变数的。此处的gap计算方式遵循Knuth提出的算法,gap=[gap/3]+1,且在Kunth的大量实验统计下,其时间复杂度在
这个区间内。